·項(xiàng)目背景
現(xiàn)代冶金行業(yè)橋式起重機(jī)工作中對在工位操作越來越精準(zhǔn),需要駕駛員及時準(zhǔn)確觀察工位狀態(tài)���,但是由于駕駛室的位置和現(xiàn)場的情況導(dǎo)致視角和觀察效果一直不好�����,一旦吊鉤沒有完全入位就會發(fā)生嚴(yán)重的生產(chǎn)事故�����,甚至涉及生產(chǎn)停滯�、人員傷亡?,F(xiàn)急需要通過一種無線工位視頻系統(tǒng)來解決此類問題���。
·項(xiàng)目概述
本系統(tǒng)利用先進(jìn)的行車定位系統(tǒng)�,視頻采集技術(shù)�,無線傳輸技術(shù)等,把工位視頻傳輸?shù)綄?yīng)起重機(jī)駕駛室輔助駕駛員視野���,避免駕駛室內(nèi)駕駛員的視覺盲點(diǎn)����,在該方案的基礎(chǔ)上,后期可以擴(kuò)展功能�����,新增人工智能分析判定吊鉤入耳狀態(tài)���,并對監(jiān)測輸出判定結(jié)果��。
系統(tǒng)能夠在冶金鋼包裝吊方面有效的輔助工作人員了解鋼包吊裝過程中雙吊鉤與吊耳配合情況����、鋼包吊運(yùn)過程中的姿態(tài)情況及平衡梁吊耳安全情況�,避免吊鉤裝吊不到位導(dǎo)致的鋼包脫落造成的嚴(yán)重安全事故,有效地提高工作效率��,增加安全性��,減少失誤率�����。
· AI智能分析模塊
在地面工位配套安裝AI分析終端。通過AI分析終端對工位視頻進(jìn)行分析得出吊鉤入位實(shí)時狀態(tài)���。
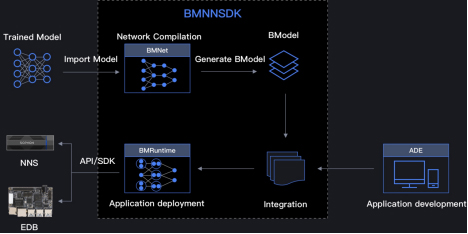
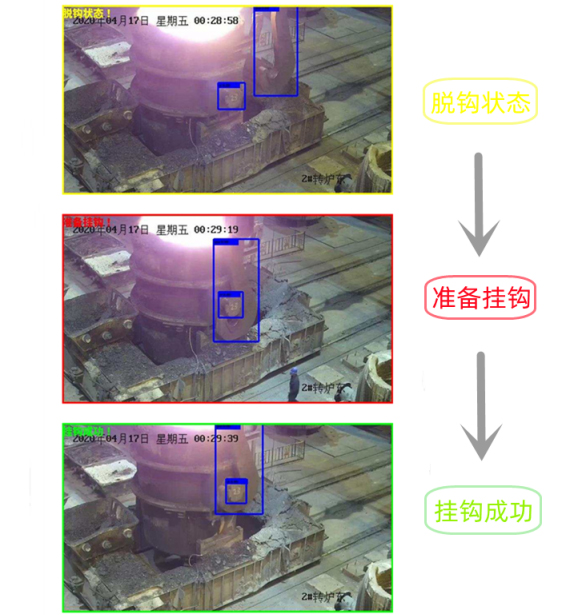
采用先進(jìn)的AI技術(shù)完成視頻分析��、邊緣計(jì)算TPU支持RISC-V生態(tài)�、支持 DNN神經(jīng)網(wǎng)絡(luò)模型分析��、編譯和調(diào)整在邊緣設(shè)備中進(jìn)行實(shí)時推理�,快速部署現(xiàn)有的主流模型或訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)模型,智能判斷鉤頭與鋼包掛耳的入位情況(接近�����、入位���、脫離)等��,并作為輔助提示司機(jī)�����。再經(jīng)司機(jī)和地面指揮人員實(shí)現(xiàn)三重確認(rèn)。
·AI智能分析終端的學(xué)習(xí)原理
·機(jī)器視覺采樣
·神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)和分析:通過神經(jīng)網(wǎng)絡(luò)深度學(xué)習(xí)可以檢測各種皮帶撕裂特征碼�,通過特征碼來識別撕裂狀態(tài)。
?邊緣計(jì)算:由AI芯片組成的AI智能終端能獨(dú)立完成分析和識別、無需服務(wù)器運(yùn)算�,斷電獨(dú)立工作,不受上位機(jī)影響�,毫秒級的響應(yīng)速度
·AI智能分析終端設(shè)備特點(diǎn)
·AI智能分析終端采用聚焦于邊緣應(yīng)用的深度學(xué)習(xí)推理人工智能芯片;
·TPU在8位整數(shù)運(yùn)算下���,可以提供1TOPS的算力��;
·在Winograd卷積加速運(yùn)算下�,提供高達(dá)2TOPs 的算力��;
·特殊設(shè)計(jì)的 TPU 調(diào)度引擎能有效地為所有的張量處理器核心提供極高的帶寬數(shù)據(jù)流��;
·芯片內(nèi)含2MB內(nèi)存, 可以為性能優(yōu)化和數(shù)據(jù)重用提供最佳的編程靈活性�。
·主流的深層學(xué)習(xí)框架,比如Caffe 和 Tensorflow���,所有常見的 CNN/RNN/DNN 神經(jīng)網(wǎng)絡(luò)模型都可以在平臺被運(yùn)行��;
·專為人工智能應(yīng)用設(shè)計(jì)的多功能加速平臺�,可以作為深度學(xué)習(xí)推理加速的協(xié)處理器���,可以做為主處理器從以太網(wǎng)接口或USB接口接收視頻流�、圖片或其它數(shù)據(jù),然后執(zhí)行推理和其他計(jì)算機(jī)視覺任務(wù)���。
AI智能分析結(jié)果演示
·AI算力:21 TOPS (INT8)
·GPU類型:384-core NVIDIA Volta GPU with 48 Tensor Cores
·GPU最大頻率:1100 MHz
·CPU:6-core NVIDIA Carmel ARMv8.2 64-bit CPU
·視頻編碼:2x 4K60 | 4x 4K30 | 10x 1080p60 | 22x 1080p30 (H.265)
·深度學(xué)習(xí)加速器: 2x NVDLA Engines
·視覺加速器:7-Way VLIW Vision Processor
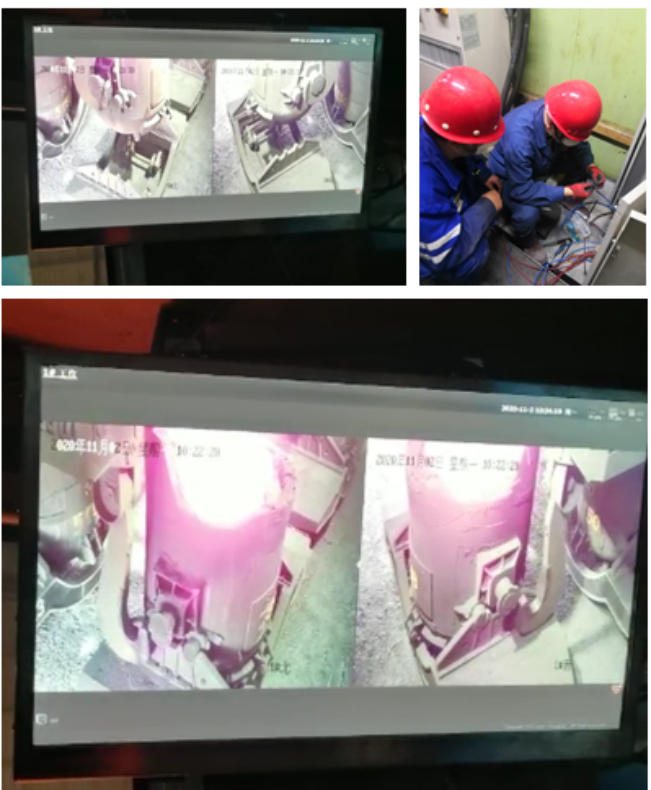
·現(xiàn)場使用圖

首鋼現(xiàn)場使用圖片
魯麗鋼鐵公司現(xiàn)場使用圖片

漢中鋼鐵現(xiàn)場使用圖片
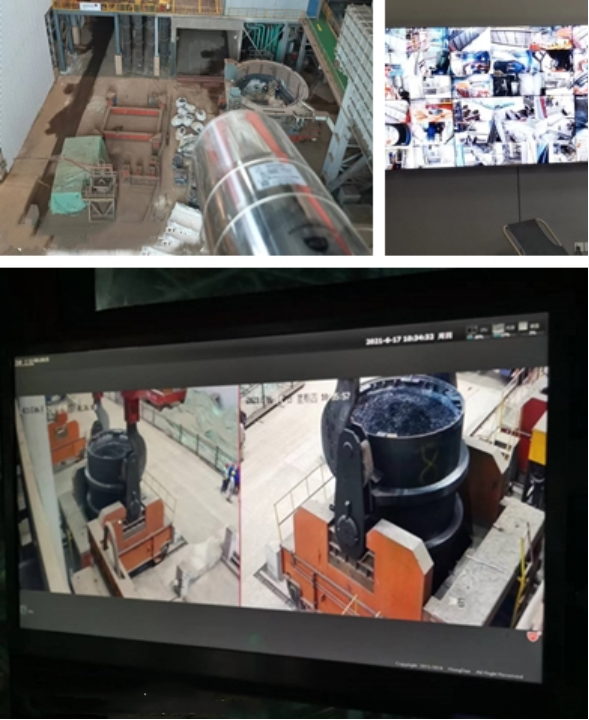
永鋒鋼鐵現(xiàn)場使用圖片

濰坊特鋼現(xiàn)場使用圖片